| 全体のイメージ図 |
 |
無人着陸探査機
探査船「エンデヴァー」では、様々なミッションが実施されましたが、
その中の一つとして、エウロパ表面への着陸探査があります。当着陸探査機はエウロパへの着陸調査を実施するための探査機です。
探査機は、エウロパ表面での写真撮影や表面サンプル採取を実施しますが、
エウロパ表面は主に氷で構成されていることを想定し、表面の氷を掘削/加熱して水を得る実験も行う事になっています。
水は原子力推進の宇宙船の推進剤に利用する事が可能なので、探査機での水採取と推進剤への流用は、
将来、木星を燃料補給地として活用するための重要な実験となります。
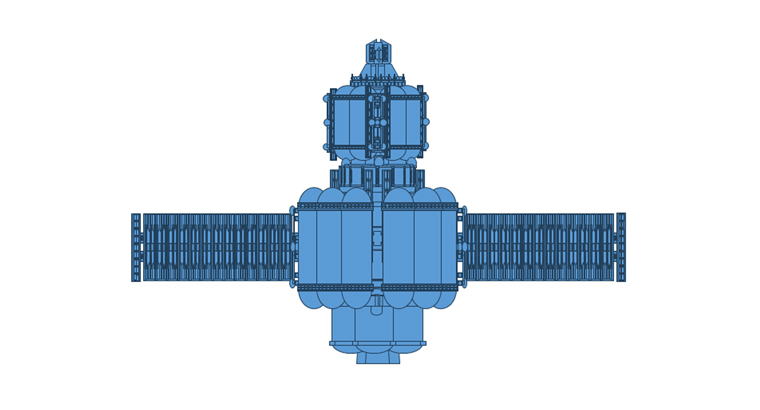
無人着陸探査機の全体イメージ図を以下に示します。
| 全体のイメージ図 |
|
無人着陸探査機の各コンポーネントについて説明します。
詳細は「無人着陸探査機」もあわせて参照してください。
| 上左:探査機(着陸脚未展開)/上中央:探査機(着陸脚展開)/上右:探査機(掘削調査時)/下:軌道船 | |
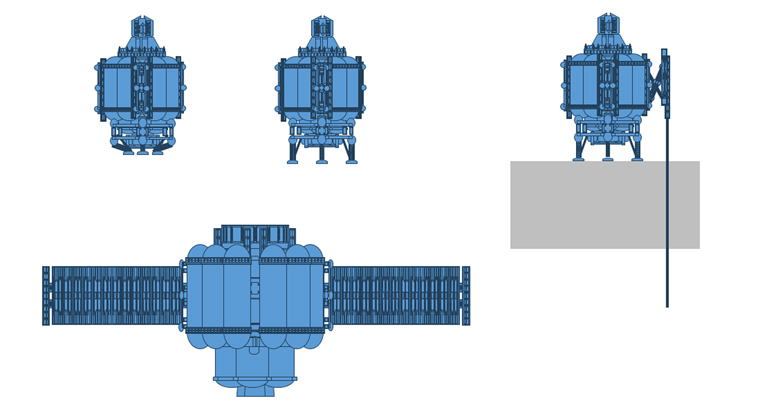 |
<着陸探査機部分> ●制御装置/調査用機器 ・制御システム、通信システム ・試料保管容器 ・分析機器 ●採取装置 ・掘削用ドリル ・加熱装置 ●推進システム ・推進剤タンク ・小型原子炉ユニット/推進システム ・着陸脚/ドッキング装置 <軌道船部分> ●制御装置/ドッキング装置 ・制御装置/通信装置 ・ドッキング装置 ●推進システム ・推進剤タンク/小型原子炉ユニット ・可変磁気プラズマ推進システム ・ラジエーターパネル |
エウロパ周回軌道上の軌道船から、エウロパへの離着陸での飛行コースと、飛行中各段階での状況について説明します。
エウロパ周回軌道からエウロパ表面に向かう際には、着陸船は推進システムを使用して減速し着陸します。
エウロパには大気がないので大気の抵抗による減速はできないので、推進システムを使用して軟着陸します。
着陸後は、周辺の土地のサンプルの採取を行うとともに、
表面の土地はは氷であることが想定されるため、氷を採取後に加熱し水にしたうえで、帰還時の推進剤に流用します。
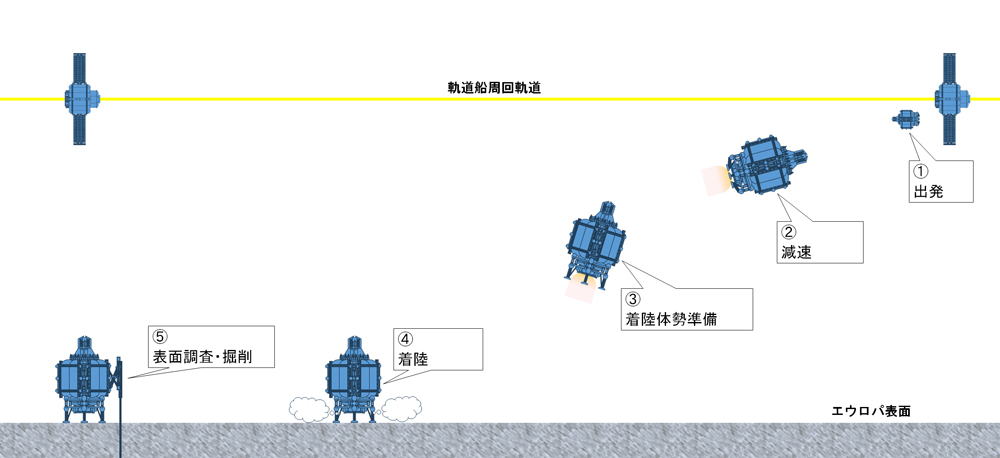 |
| <エウロパ着陸までの飛行コース> 1.出発 軌道船を出発したのち、着陸船は逆噴射を行いエウロパ表面へ向けて降下を開始する 2・減速 エウロパには大気がないので、推進システムを最大噴射し減速する 3.着陸体制準備 十分に減速を行ったところで着陸脚を展開し、垂直にゆっくりと着陸ポイントへと向かう 4.着陸 推進システムを使用して軟着陸する 5.着陸 着陸地点周辺の写真撮影、土地のサンプルを採取/分析を行う。表面が氷であることを想定し表面の氷を掘削して水に加工する |
エウロパ表面から軌道船に帰還する時には、着陸船は推進システムを使用して上昇し、軌道船の待機している軌道に向かいます。
軌道船は着陸船を回収すると、推進システムを作動させてエウロパ周回軌道を離脱して「エンデヴァー」へと帰還します。
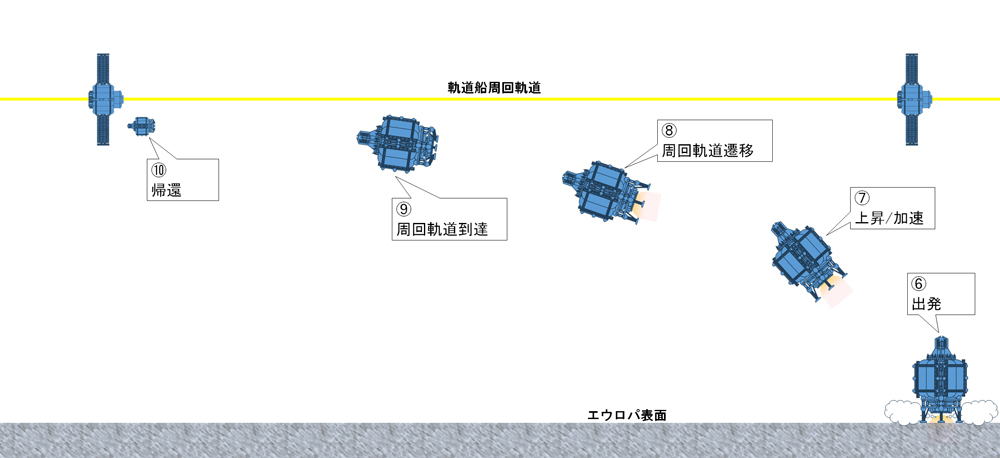 |
| <「エンデヴァー」帰還までの飛行コース> 6.出発 推進システムを使用し、垂直に離陸する 7.上昇/加速 エウロパ表面近くではほぼ垂直に上昇し、徐々に上昇角度を下げ加速する 8.周回軌道遷移 エウロパ周回に必要な速度に到達すると、主エンジンを停止し副エンジンのみで上昇を続ける 9.周回軌道到達 軌道船と同じ高度に到達すると軌道船との合流ポイントまで移動する 10.帰還 軌道船とドッキングする |
「エンデヴァー」は、本来であれば長期間の木星と衛星調査を行ったのちに土星に向かう予定でしたが、
中国の土星探査船が予想よりも早く土星に到達することが予想されたため、事業団上層部の判断で探査機のエウロパからの帰還を待つことなく
土星へと向かう事になりました。
そのため、探査機はエウロパを周回する軌道上で、「エンデヴァー」の帰還を待つことになりました。
実際には「エンデヴァー」の2回目の航海で、探査機は「エンデヴァー」に回収されることになりました。
<2026.01.16追記>
無人着陸探査機(および軌道船)の想像図をChatGPTで作成してみました。
上記の、横から見たときの図面をインプットにして実写的な絵を作成するようにと指示したら、以下のような画像ができました。
これについては、図面そのままに画像を正確に作ってくれました。
 |