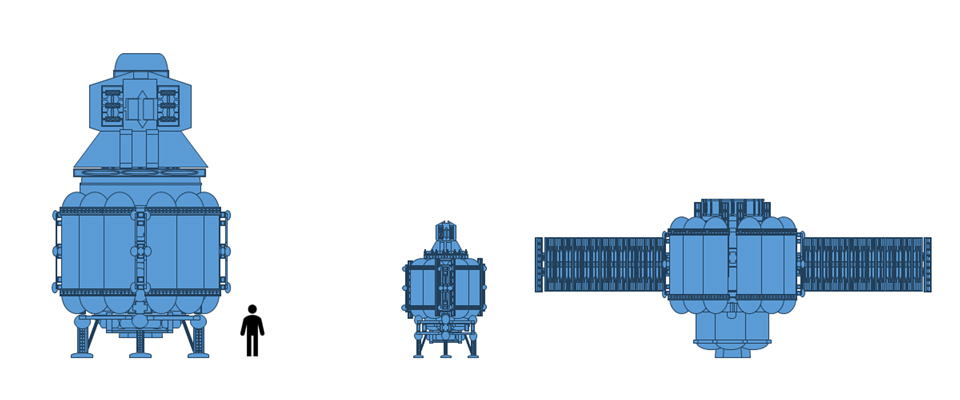
| 全体のイメージ図(右は着陸時の状態、右側に人間の図を大きさ比較の為に表示) |
 |
小型着陸船(3人乗りSSTO)
探査船「エンデヴァー」に搭載されている小型着陸船(3人乗りSSTO※1)について説明します。
この着陸船は、月や火星程度の小重力で大気のない惑星、または惑星のまわりの衛星の調査を行う事を想定して作られています。
「エンデヴァー」では木星の衛星エウロパでの着陸調査に使用されました。
小型着陸船(3人乗りSSTO)の全体イメージ図を以下に示します。
※1:Single Stage To Orbit 単段軌道到着ロケット
| 全体のイメージ図(右は着陸時の状態、右側に人間の図を大きさ比較の為に表示) |
|
小型着陸船(3人乗りSSTO)の各コンポーネントについて説明します。
船体は、指令モジュール、居住モジュール、動力/推進モジュールの3つに分かれています。
詳細は「小型着陸船(3人乗りSSTO)」もあわせて参照してください。
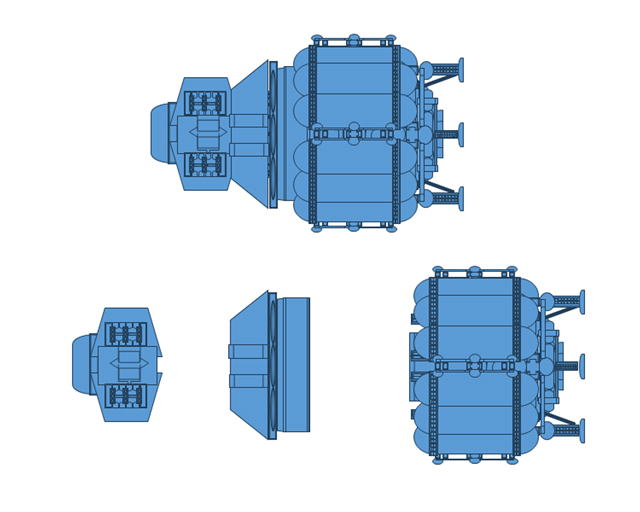 |
●指令モジュール ・コクピット、制御システム ・ドッキング用通路 ・制御システム ・エアロック ●居住モジュール ・個室、ベッド等 ・食堂/キッチン、食料倉庫 ・ユニットバス、トイレ ●動力/推進モジュール ・水、空気リサイクルシステム ・バッテリー、発電機 ・酸素/水素/メタン貯蔵タンク ・水貯蔵タンク ・超小型原子炉モジュール ・酸素/メタン推進システム ・着陸用脚 |
着陸船と、同じくエンデヴァーに搭載されている無人着陸探査機と大きさを比較し以下に示します。
| 着陸船(図左)および無人着陸探査機(図中央および右)との大きさ比較 |
 |
「エンデヴァー」から木星の衛星エウロパに着陸する場合の飛行コースと、飛行中の各段階での状況について説明します。
エウロパには大気がないため、着陸船は推進システムを逆噴射して着陸します。
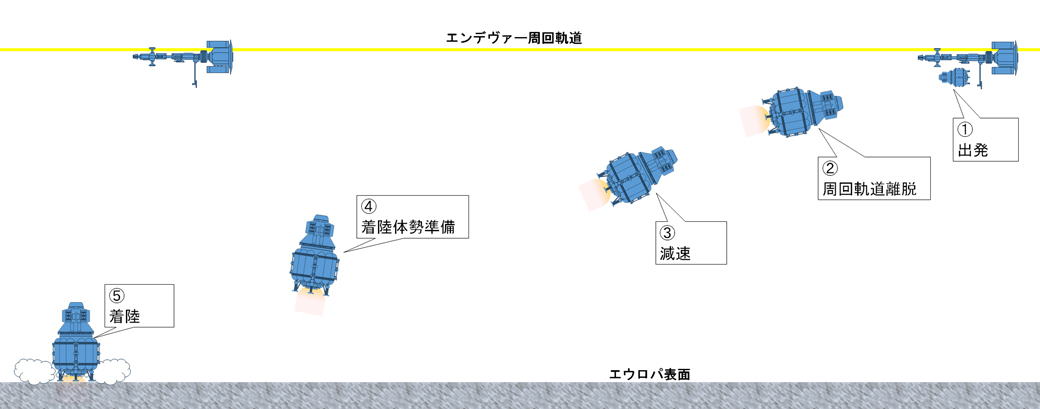 |
| <エウロパ着陸までの飛行コース> 1.出発 「エンデヴァー」を出発したのち、着陸船は逆噴射を行いエウロパ表面に向けて降下する。 2.周回軌道離脱 エウロパを周回する起動を離脱し、自由落下飛行コースに入る 3.減速 推進システムをさらに噴射し、ほぼ垂直にゆっくりと落下する 4.着陸体制準備 エウロパ表面が近くなると機体を垂直にした着陸体勢に入る 5.着陸 推進システムを使用し、垂直に着陸する |
エウロパの表面から「エンデヴァー」に帰還する場合には、着陸船は推進システムを使用して「エンデヴァー」の待機している軌道まで上昇します。
エウロパには大気がなく、月と同程度の重力なので周回軌道まで上昇するために大量の推進剤は必要ありません。
「エンデヴァー」の最初の航海では、無人着陸船での調査とともに、乗組員3人が搭乗した有人での着陸調査も予定されていましたが、
土星への到着を急ぐための宇宙船重量軽減のために、着陸船は木星周回軌道上に投棄されました。
着陸船は「エンデヴァー」2回目の探査ミッションで回収され、エウロパへの着陸調査に使用される事になりました。
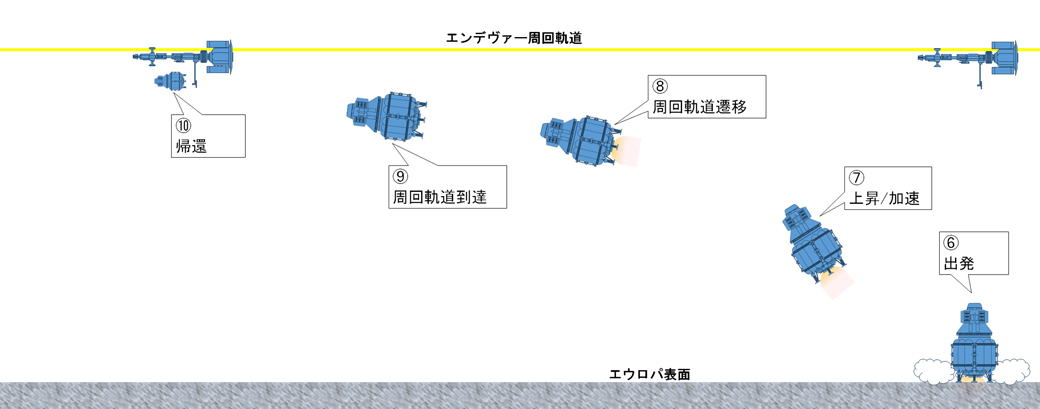 |
| <「エンデヴァー」帰還までの飛行コース> 6.出発 推進システムを使用し、垂直に離陸する 7.上昇/加速 しばらく垂直に上昇したのち、徐々に上昇角度を下げて加速する 8.周回軌道遷移 周回軌道までの弾道飛行軌道に到着すると、主エンジンを停止して副エンジンのみで上昇/加速を続ける 9.周回軌道到達 周回軌道に到達すると「エンデヴァー」との合流ポイントまで移動する 10.帰還 「エンデヴァー」に帰還する |
<2026.01.16追記>
小型着陸船の想像図をChatGPTで作成してみました。
上記の、横から見たときの図面をインプットにして実写的な絵を作成するようにと指示したら、以下のような画像ができました。
着陸脚が5本足なのは、ご愛嬌ということで。
 |